
Self-balancing Robot is very interesting challenging, it including the lack of the easy-to- assembly structures, the suitable electronic circuits and the programs.The build is straightforward and the software is free and open source, based on the ArduPilot system developed by the DIY Drones community. It’s a great way to get started with autonomous robots.
source/image: Tapendra Mandal
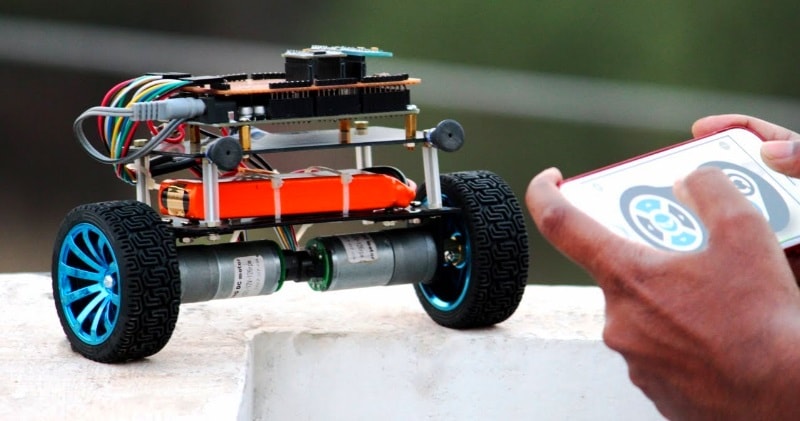
This tutorial will show you how to build an Arduino robot that balances itself.To keep the robot balanced, the motors must counteract the robot falling. This action requires feedback and correcting elements. The heart of a self-balancing bot is the IMU or inertial measurement unit, consisting of 3-axis rate gyros, accelerometers, and magnetometers.
Use Arduino as the controller and sensor MPU6050 to control the balance. Just add a simple Serial Bluetooth module and use a Bluetooth Serial Controller APP for Android Phone to make the remote control.
Advertisement
The feedback element is the MPU6050 gyroscope + accelerometer, which gives both acceleration and rotation in all three axes.The Arduino uses this to know the current orientation of the robot. The correcting element is the motor and wheel combination.










{kind=link}