
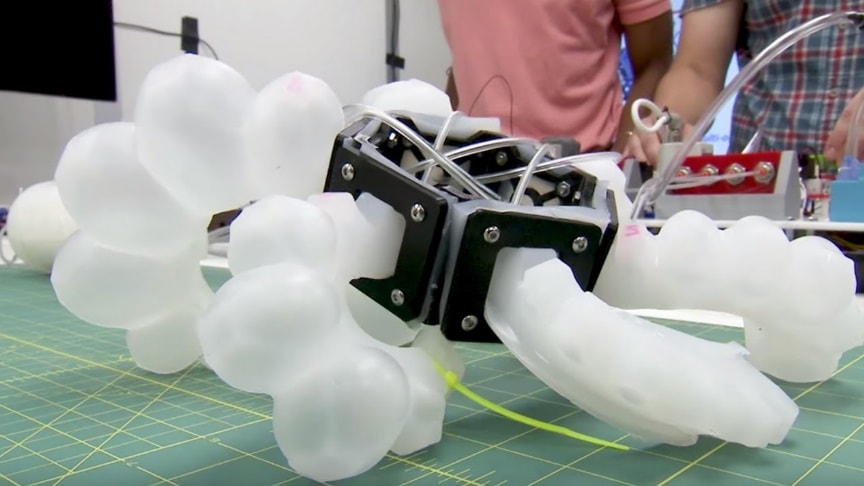
In Langley’s makerspace lab, researchers are developing a series of soft robot actuators to investigate the viability of soft robotics in space exploration and assembly. By design, the actuator has chambers, or air bladders, that expand and compress based on the amount of air in them.
source/image: NASA Langley Research Center
While the word ‘robot’ conjures images of metal arms and gears, soft robotic actuators are bioinspired, looking at the way nature works to create new robot movements. By being constructed from highly flexible materials, soft robots are able to move similarly to living organisms, allowing new ranges of motion that traditional robots simply can’t have. Space applications of these actuators can expand the role of robots in exploration and assembly.
While in the early stages of their research, Sullivan and Fitzpatrick are looking at a series of properties to understand how actuators can be built and used in space. Their current process is to 3D print a mold and then pour in a flexible substance like silicone. By design, the actuator has chambers, or air bladders, that expand and compress based on the amount of air in them.
Advertisement
In particular, the interns are investigating four key properties of the actuators — mobility, joining, leveling and shaping — and how to use them in space exploration. Mobility refers to how the soft robot moves in its environment, while joining concerns how robots can link together (for example, to make a large temporary shelter). Leveling refers to how actuators can create a surface, such as filling in space underneath a lunar habitat, while shaping examines ways of adding strength to materials like dust shields.










{kind=link}