
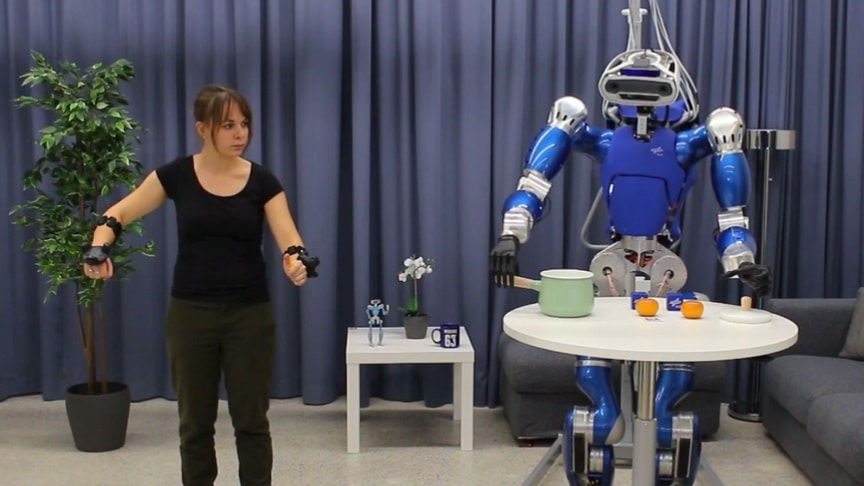
A wearable, ultralight interface for bimanual teleoperation of a compliant, whole-body-controlled humanoid robot:This video presents an unobtrusive bimanual teleoperation setup with very low weight, consisting of two Vive visual motion trackers and two Myo surface electromyography bracelets.
source/image: DLRRMC
The video demonstrates complex, dexterous teleoperated bimanual daily-living tasks performed by the torque-controlled humanoid robot TORO.In order to employ service robots in domestic environments, it is necessary to adapt these robots to the human’s living space in the best possible way.
Legged walking machines allow the climbing of stairs and stepping over small obstacles without the need of circumnavigating them. Depending on the specific application a different design with two, four, or six legs will be the most appropriate choice.
Advertisement
We decided to build a system with humanoid shape based on two legs, because this allows for stable standing and dynamic walking with a small support area. From a sciencific point of view this system allows for fundamental research on dynamic walking and multi-contact interaction in general human environments.










{kind=link}