
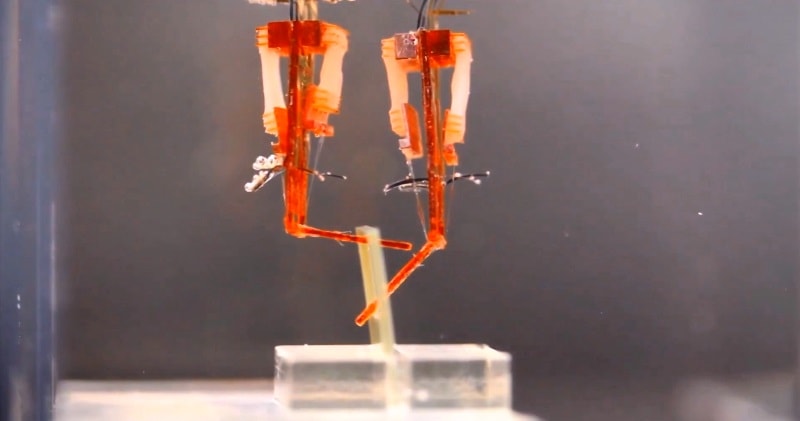
Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues. Yuya Morimoto et al (2018), Science Robotics. Biohybrid robots are attracting attention as promising candidates to enhance robot applicability to studies on biological designs and in vitro construction of biological dynamic systems.// ScienceVio
source/image: ScienceVio
Rapid progress in biohybrid robots with skeletal muscle tissues formed on a flexible substrate has enabled various types of locomotion powered by muscle tissue. However, it has been difficult to achieve high levels of both large and long-term actuations of the skeletal muscle tissues because of their spontaneous shrinkage through the course of the tissue culture.
To overcome this limitation, we adapted the concept of biological systems and developed a biohybrid robot actuated by an antagonistic pair of skeletal muscle tissues. Our robot achieved large actuation (~90° of rotation of a joint) by selective contractions of the skeletal muscle tissues and a long lifetime (~1 week) by balancing tensions of the antagonistic tissues to prevent the spontaneous shrinkage.
Advertisement
As a demonstration, we showed that our biohybrid robots allowed a pick-and-place manipulation of objects. This research may provide a platform to exceed the limitations of design in conventional biohybrid robots and replicate various lifelike movements.ScienceVio










{kind=link}