
This paper presents the design of a new 14-DoF dual manipulation system for the CMU ballbot. The resulting configuration represents a new type of dexterous and agile mobile manipulation robotic platform.
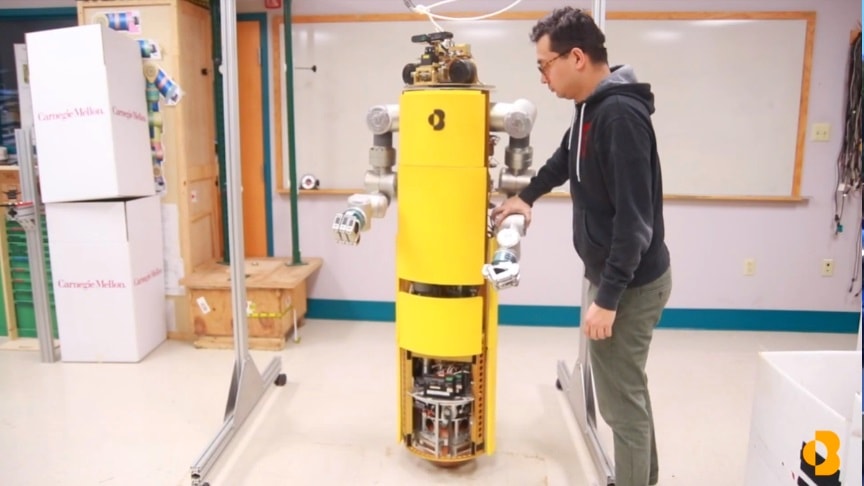
source/image: CMU Ballbot
Agile in terms of the ballbot’s smooth motion and dexterous in terms of the new ability to skillfully manipulate objects and to interact with the environment./CMU Ballbot
The system is made up of two 7-DoF arms that each weigh 12.9 kg. With its length of 0.815 m, a maximum payload of 10 kg at full extension configuration, and large bi-manual workspace, the performance of the arms are comparable to state-of-the-art industrial robot arms.
Advertisement
To attain this performance, design features include highly integrated sensor-actuator-control units in each joint, lightweight exoskeleton structure, and anthropomorphic kinematics. The integration of the arms to the CMU ballbot is demonstrated through the execution of heavy payload manipulation and balancing experiments./CMU Ballbot










{kind=link}