
We have developed a computationally efficient trajectory generator for six degrees-of-freedom multirotor vehicles, i.e. vehicles that can independently control their position and attitude.
source/image: Dario Brescianini
The trajectory generator is capable of generating approximately 500’000 trajectories per second that guide the multirotor vehicle from any initial state, i.e. position, velocity and attitude, to any desired final state in a given time. In this video, we show an example application that requires the evaluation of a large number of trajectories in real time.Dario Brescianini
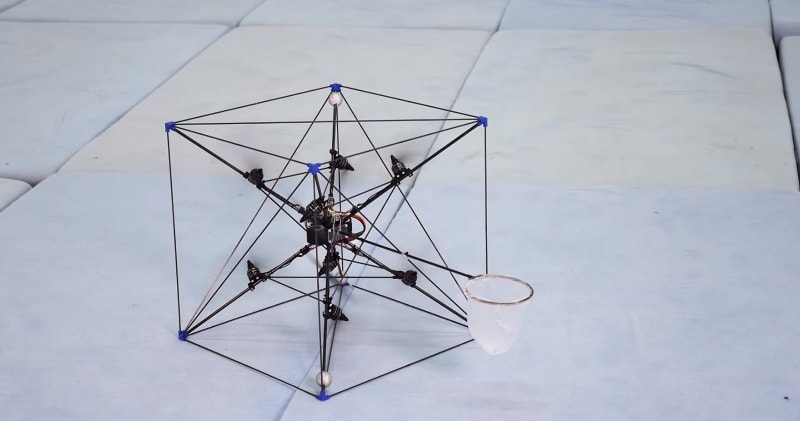
The Omnicopter, while playing fetch in the demo video, is capable of both catching the flying object and at the same time, keeping the boundary net stationary – even while the rest of its platform remains in motion. Returning the ball to its original spot takes strategic rotating and mid-air adjustments that no quadcopter drone could ever achieve.
Advertisement
The multirotor vehicle used in the demonstration is an omni-directional eight-rotor vehicle. Its unique actuator configuration gives it full force and torque authority in all three dimensions, allowing it to fly novel maneuvers./Dario Brescianini










{kind=link}